2.1.
Caractérisation du captage du décalage du chariot par rapport
au fil
Objectifs : observer la relation entre le calcul du décalage
par l'ordinateur en fonction du décalage réel et des informations
envoyées par les capteur.
|
Notations
y : décalage roue/fil en mm (<0 sur la figure)
d : distance des capteurs/roue
UCD : tension issue du capteur droit
UCG : tension issue du capteur gauche
MCD : mesure en numérique tension UCD
MCG : mesure en numérique tension UCG
My : calcul en numérique du décalage y
GDC : coefficient capteur de décalage chariot.
|
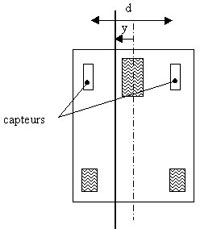 |
Schéma de calcul de My en fonction de UCG
et UCD.
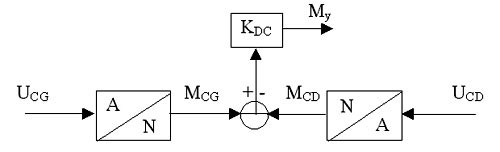
Avec MCG = KCAN.UCG
et MCD = KCAN.UCD
Expérimentation :
 Valider dans le menu " étude " le choix " Décalage chariot ". Le schéma à l'écran
est celui de la page 21.
Valider dans le menu " étude " le choix " Décalage chariot ". Le schéma à l'écran
est celui de la page 21.
Dans le menu Editer / Durée d'acquisition choisir la valeur
0 (ça fonctionnera mieux).
Choisir un gain KDC = 1
Sélectionner les points de mesures utiles en cliquant sur les points de mesures
associés à MCD et MCG après avoir
sélectionné l'outil de placement des points test.
Cliquer sur l'outil de sélection.
Appuyer sur START (Si nécessaire précédé de RAZ).
Positionner la roue du chariot entre -40 et 40 mm avec un pas de 5 mm. A chaque
fois, attendre que les capteurs réagissent. Noter les valeurs MCD
et MCG et cliquer dans le tableau de valeur (au milieu
de l'écran) à la ligne correspondant à y : Les courbes de droites évoluent.
Exploitation :
Tracer My(y) = MCD(y) - MCG(y)
Conclure sur une éventuelle linéarité de la courbe et d'un coefficient tel que
y = GDC.MY
la suite, vite ! >>