|
 |

1.1. Groupes cinématiques
Objectifs : L'objectif global du TP est de tracer la courbe
donnant l'angle d'orientation de la vis en fonction de l'angle d'orientation
du bras en utilisant trois modèles différents :
- Un modèle physique : mesures sur la maquette.
- Un modèle mathématique : méthode analytique.
- Un modèle numérique : utilisation du logiciel Mecaplan.
L'objectif immédiat est d'appréhender la modélisation de la maquette.
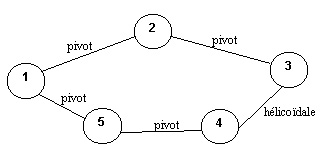
On donne une modélisation spatiale de la maquette par le graphe des liaisons, et par le schéma cinématique.
|
|
![]() Identifier les groupes cinématiques sur la maquette réelle.
Identifier les groupes cinématiques sur la maquette réelle.